Par cinemático: concepto, clasificación. Rótula, bisagra, lazo
Cualquier mecanismo complejo en ingeniería consiste ende un conjunto de elementos simples. Para comprender cómo funciona el sistema en su conjunto, es necesario desmontar el trabajo de cada nodo. Y esto es, sobre todo, una comprensión de lo que es un par cinemático.

Términos básicos
Si toma dos elementos (enlace), quecontacto entre ellos, y si bien esta relación es móvil, entonces tenemos un par cinemático (KP). Su característica distintiva es una cierta limitación en el movimiento de enlaces.
Un sólido puede tener una capacidad limitadamovimiento, y luego hay tal cosa como una condición de comunicación. Se cuentan hasta cinco condiciones de comunicación, teniendo en cuenta la interacción de los enlaces en el par. De ahí la división en clases. Se dedujeron cinco para pares cinemáticos, cada uno de ellos tiene su propio grado de movilidad. En la clase hay seis grados de movilidad. Toda la mecánica moderna se basa en la aplicación de las últimas tres clases de pares cinemáticos.
Cada cuerpo (enlace) tiene su propia geometría. Por lo tanto, los elementos correspondientes a esta forma también están en contacto. Resulta que el KP solo podrá realizar un movimiento tal que no contradiga la geometría de los enlaces. Además, para realizar cualquier movimiento entre sí, un enlace debe estar permanentemente fijo, y el segundo en el par se ve afectado.
Cada punto en el enlace en el momento del movimientopasa el camino (trayectoria). Esta trayectoria puede tener la forma de una curva ubicada en un plano. Cuando los planos de ubicación de las curvas de ruta de los enlaces en el par son paralelos entre sí, es un par plano. Si las curvas del movimiento de los puntos de los enlaces se ubican en un espacio tridimensional, el par cinemático es espacial.

Tipos
Existen los siguientes tipos de mecanismos.
Par rotacional es un sistema de un solo móvil. Los enlaces que forman dicho par son capaces de realizar solo una rotación característica alrededor de la barra o el eje. En este caso, el contacto de los elementos se lleva a cabo en la superficie de una forma cilíndrica. Tal sistema geométrico está cerrado y pertenece a los inferiores. El mecanismo análogo en el campo de los pares superiores es un cojinete de bolas.
Un par de interacción progresiva lo mismo que el anterior, en términos dede la unidimensionalidad En dicho sistema, los enlaces solo pueden realizar movimientos de traslación en una dirección rectilínea. El mecanismo es el par más bajo, cerrado en parámetros geométricos.
Par del tipo de cilindros interactuantes. Este sistema ya tiene dos movimientos, su geometría está cerrada. Es inferior: los enlaces pueden rotar y avanzar en la dirección de avance.
Par de tipo esférico es un sistema de tres deslizamientos La libertad de dicho par tiene un grado que permite que los enlaces giren en el espacio tridimensional, describiendo los ejes de coordenadas. También es el mecanismo geométricamente cerrado más bajo.
Par de tipo esférico con un dedo - De dos movimientos. El movimiento (rotación relativamente independiente) de los enlaces en este par está limitado por el dedo y la ranura. El par de orden inferior está geométricamente cerrado.
Par de tipo de tornillo tiene un grado de libertad de movilidad única. El mecanismo de orden más bajo es un sistema geométricamente cerrado, en el que solo es posible un movimiento helicoidal con un cierto paso. El desplazamiento en las direcciones angular y lineal es estrictamente no ambiguo.
Un par de tipo plano, plano-cilindro, plano-bola. En estos mecanismos, se usa el cierre de fuerza. En clase, el primero se refiere a lo más bajo, el resto a los sistemas superiores. En la práctica, tales pares cinemáticos de enlaces no han encontrado aplicación.
Clasificación
KP tiene la siguiente clasificación.
- Por el tipo de comunicación en el lugar de contacto.
Los pares del orden más bajo son contactados por enlaces asuperficies. Encontraron una amplia aplicación en mecánica, tienen un diseño más simple que los pares superiores. Estructuralmente, sus enlaces tocan los planos y se deslizan a lo largo de ellos. Por lo tanto, la carga se distribuye uniformemente dentro del elemento, pero la fricción en el punto de unión de los enlaces, respectivamente, aumenta. El momento positivo de los pares del orden más bajo es que es posible transferir grandes cargas del enlace al enlace.
Los pares cinemáticos superiores tienen enlaces de contactopor curva o puntos. Su objetivo principal es reducir el grado de fricción entre los elementos de los enlaces durante el movimiento. Un ejemplo clásico de pares superiores es rodamientos o rodillos. El diseño interno de estos elementos sobre el movimiento de los enlaces conectados al par no afecta. Para simplificar el mecanismo, los métodos se utilizan para reemplazar los pares cinemáticos superiores por análogos inferiores.
- Por el tipo de movimiento relativo que hacen los enlaces de la pareja.
- Rotacional
- Progresivo
- Cilíndrico
- Esférico.
- Tipo de tornillo
- Plano
Si el mecanismo contiene solo pares que usan solo los primeros cuatro tipos de movimiento, entonces se llama tipo de palanca.
- Por el tipo de comunicación entre enlaces.
- Por la fuerza, por ejemplo, presión de resorte, peso corporal, gas comprimido o líquido, fuerzas de inercia.
- Debido al diseño geométrico de los elementos del par.
- Por el grado de movilidad de los enlaces durante el movimiento.
- Por el número de condiciones de comunicación.
Mecanismos reversibles e irreversibles
Si es posible, los movimientos de los enlaces en el sistema relativos a la elección de un enlace condicionalmente fijo se distinguen por CP reversibles e irreversibles.
Si en el mecanismo, cualquier elemento en el librestate repite el movimiento relativo del elemento en un estado condicionalmente inmóvil, luego el par cinemático se considera reversible (ejemplo: pares de movimiento único).
Si en el mecanismo cada elemento en el estado libre hace que su movimiento relativo sea diferente de los demás, dicho par es irreversible.
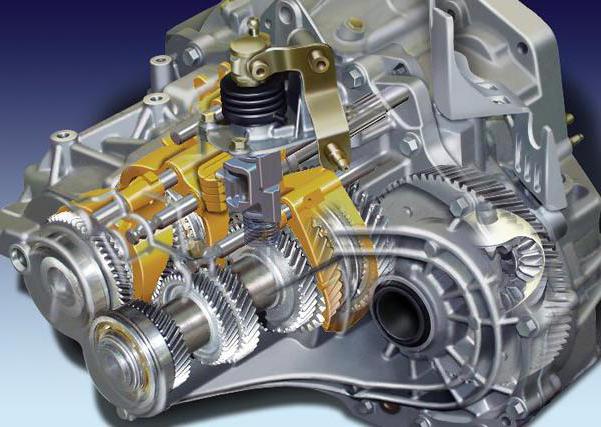
Tipos de engranajes en mecánica
Por transmisión mecánica se entiende una mecánicaun sistema que convierte la cinemática y la energía del motor en una forma aceptable para el uso de los cuerpos de trabajo de las máquinas para funcionar en un modo determinado.
Hay programas:
- Tipo dentado Esta conexión se basa en elementos cilíndricos y cónicos. Los primeros transmiten el movimiento en un plano, el último en un ángulo. Las transmisiones de engranaje se caracterizan por su compacidad y la posibilidad de transferir grandes capacidades. Son altamente eficientes, pero crean ruido durante el funcionamiento y requieren lubricación.
- Tipo de tornillo Además del tornillo clásico, esta categoría incluye engranajes hipoides y sinfín. El último tipo de transmisión mecánica se usa cuando es necesario obtener una relación de transmisión grande. También se distinguen por la ausencia de ruido y la suavidad en el trabajo y la capacidad de auto inhibirse. Las deficiencias incluyen baja eficiencia y alto desgaste.
- En elementos flexibles. Aquí el movimiento y la energía se transmiten en un plano debido a varios cinturones y cadenas. Las transferencias de banda son simples y pueden cubrir grandes distancias.
- Tipo de fricción En relaciones de esta naturaleza, se usa la fuerza de fricción. Se utilizan en mecanismos que se operan en condiciones difíciles.

Tipo de articulación esférica
El objetivo principal de la rótula esla varilla de la sección transversal de la cremallera de dirección podría conectarse a través de la palanca con la plataforma giratoria de la rueda. El diseño de la bisagra incluye una punta; en él se integran galletas saladas, un resorte, una tapa de sujeción, un dedo esférico, una lata de aceite. El resorte presiona sobre las bolas de la rótula, que la superficie de la forma esférica mantiene el dedo. Este diseño asegura que el mecanismo funciona incluso cuando se desgasta.

Bucle de bisagra
Bisagras o toldos: mecanismos integradosla base de la bisagra cilíndrica. Sirven para abrir y cerrar puertas, ventanas y puertas de muebles. El diseño del lazo incluye dos telas rectangulares (tarjetas) en las que se taladran los orificios de fijación y el núcleo. Las bisagras de las bisagras están hechas principalmente de acero y varias aleaciones.

Conclusión
Es interesante que las articulaciones humanas sean todos los principales tipos de pares cinemáticos descritos anteriormente. Por lo tanto, la necesidad de una comprensión de los procesos que tienen lugar en la mecánica es obvia.